
Samsung BotChef v.3
BotChef was a project within Samsung’s Think Tank Team focused on prototyping robotic technologies and exploring their potential role in a future consumer home. The third and final iteration of the arm incorporated key learnings from earlier versions, resulting in a more refined and capable system.
In this iteration, I developed a range of improvements across industrial design, structural architecture, and actuation systems, contributing to a more integrated and cohesive overall platform.




Design
The v.3 architecture evolved significantly from the dual-arm configuration used in v.2. To reduce cost and system complexity, the design transitioned to a single robotic arm mounted on an under-cabinet linear rail. This approach preserved functional reach while simplifying the overall system architecture. In parallel, improvements were made to both the mechanical and electronic systems to enhance control performance and reliability.
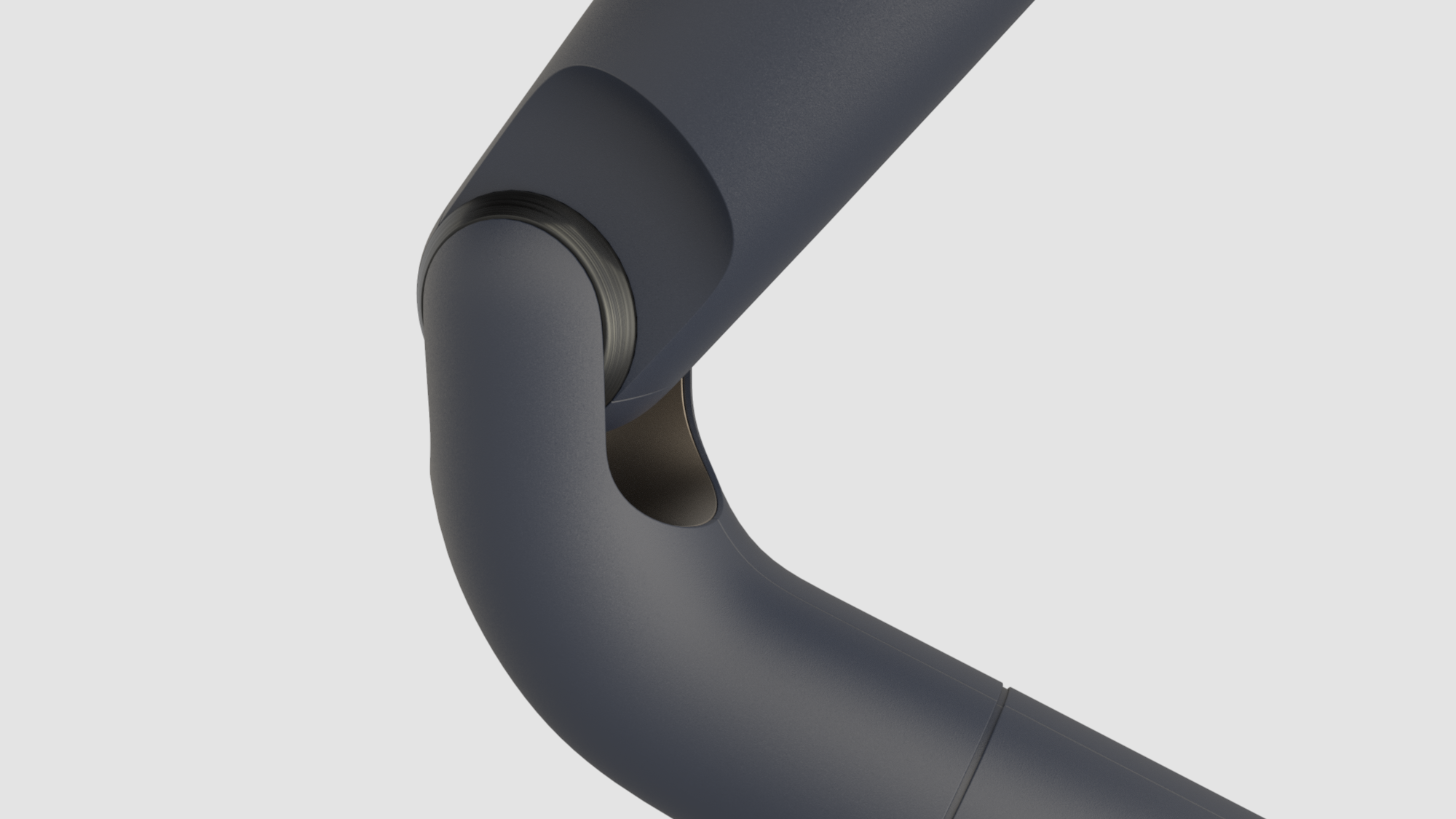
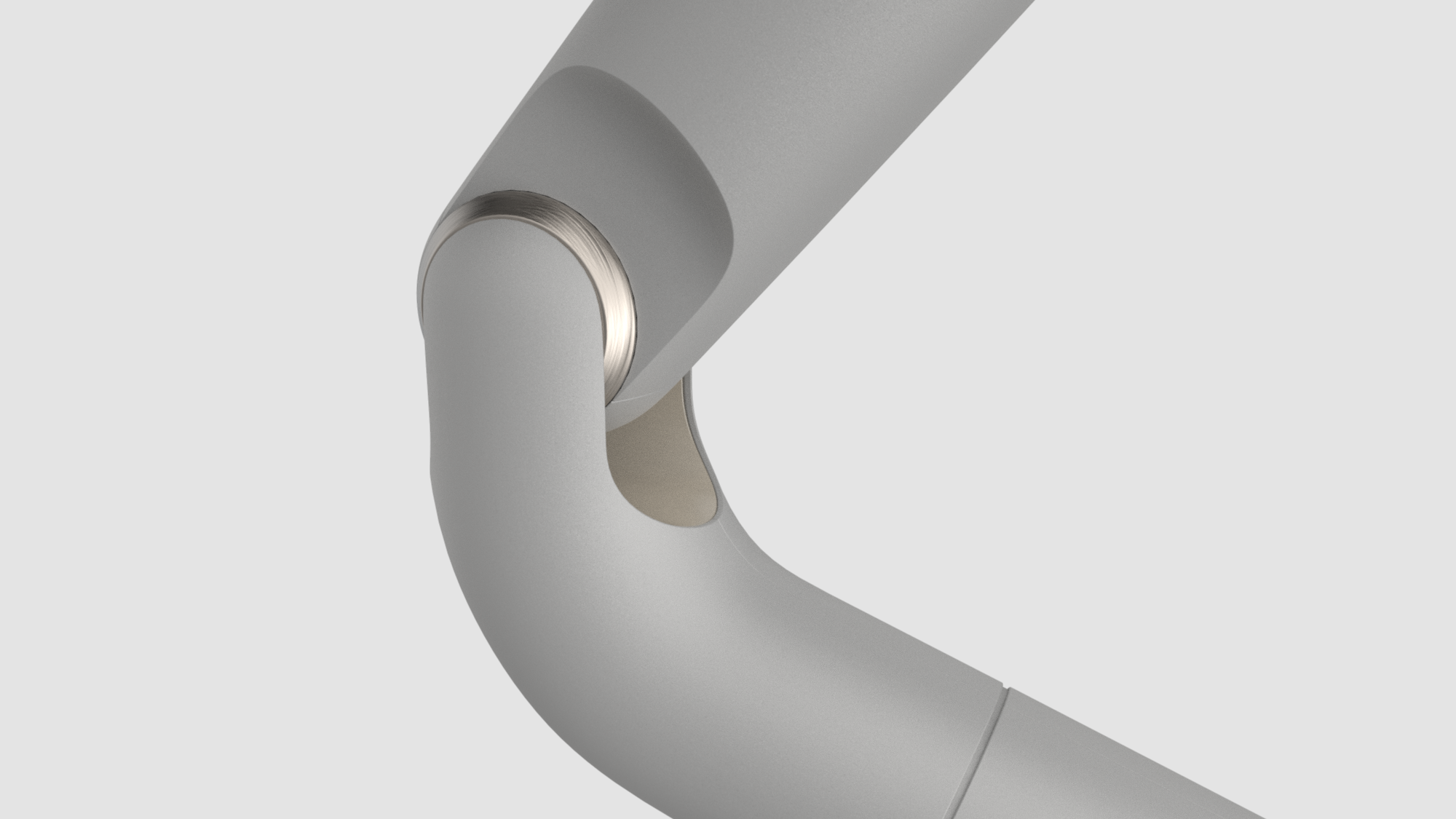

CMF
The v.2 design employed a minimal, predominantly white CMF approach. For v.3, the palette was redefined with a more appliance-oriented metallic finish, aligning the system more closely with contemporary kitchen product language.



Linear Rail
The linear rail system, which I designed, was a key addition to the v.3 platform. Its primary purpose was to expand the working envelope of a single arm to match or exceed the reach of the previous dual-arm configuration. The rail was also designed for easy removal and integrated mounting of computer vision sensors, supporting system perception and flexibility in installation.



Cycloidal Gearbox
During the BotChef project, I developed a series of cycloidal gearbox-based actuator systems for use in the robotic arm. In v.3, two of these variants were implemented in the first and second rotary joints. Further details on this work are documented separately.